 Fraunhofer-Institut für Kommunikation, Informationsverarbeitung und Ergonomie FKIE
Fraunhofer-Institut für Kommunikation, Informationsverarbeitung und Ergonomie FKIE
Bewährungsprobe für Roboter und Drohnen beim European Robotics Hackathon 2025
Es waren die wohl mit Abstand schwierigsten Szenarien seit der Premiere des European Robotics Hackathons (EnRicH) im Jahr 2017: Anfang Juli trafen sich im nie in Betrieb gegangenen AKW Zwentendorf bei Wien mehr als 120 Robotikexperten aus ganz Europa und Kanada, um bei der 5. EnRicH ihre Bodenroboter und Drohnen unter realistischen Bedingungen zu testen. In den drei Hauptkategorien »Search & Rescue«, »Mapping« und »Manipulation« hatte das Organisationsteam des Fraunhofer-Instituts für Kommunikation, Informationsverarbeitung und Ergonomie FKIE einen Schwerpunkt auf kombinierte Szenarien für fahrende und fliegende Systeme gelegt, was viele Teams vor Probleme stellte. Viele – aber nicht alle.


Inmitten des langen, kahlen Gangs steht Nomad. Die Lichter des Roboters leuchten, sonst tut sich seit geraumer Zeit nichts. Patryk Dudziński und seine Kollegen vom polnischen Team KoNaR schauen etwas ratlos auf ihre Monitore, beratschlagen, probieren es erneut, doch Nomad bewegt sich keinen Zentimeter vorwärts. »Wir können den Roboter anpingen und erhalten auch eine Antwort«, erklärt Dudziński. »Doch wenn wir mehr von ihm wollen, streikt er. Das Problem ist die Kommunikation: Wir bekommen hier einfach keine stabile Funkverbindung hin.«
Militär stellt echte radioaktive Quellen zur Verfügung
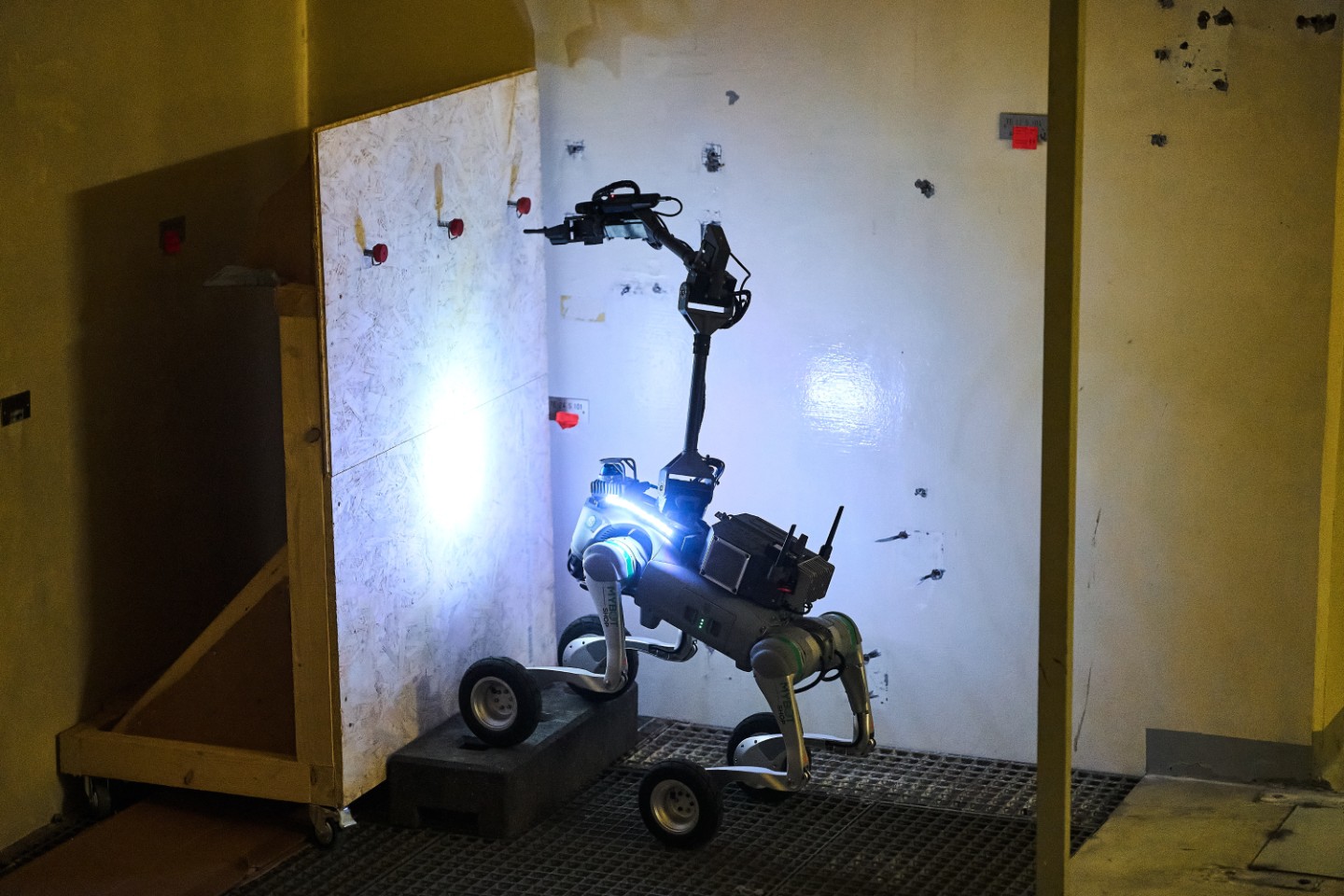
Mit diesem Problem steht Team KoNaR bei dem viertägigen Hackathon längst nicht allein da. Insgesamt 15 Teams, darunter Schüler und Studenten ebenso wie Vertreter aus Forschung und Industrie, sind zu dem weltweit einzigartigen Veranstaltungsort gereist, um ihre Unmanned Ground Vehicles (UGV) und Unmanned Aerial Vehicles (UAV) unter schwierigsten Bedingungen auf den Prüfstand zu stellen. Enge Kurven, schmale Räume, steile Treppen, kaum Licht, dazu meterdicke Beton- und Stahlwände, die keine Funkverbindung zur Außenwelt zulassen, gehören dazu. Gastgeber des alle zwei Jahre stattfindenden Hackathons ist das österreichische Amt für Rüstung und Wehrtechnik (ARWT), das für ein weiteres Alleinstellungsmerkmal verantwortlich zeichnet: Das Militär stellt echte radioaktive Quellen zur Verfügung, die detektiert bzw. kartiert werden müssen.
Exakt fünf Quellen sind es in diesem Jahr, doch das wissen die Teams bei ihren jeweils 30-minütigen Durchgängen nicht. Rund 40 Kameras haben jeden Winkel des Hackathon-Areals im Blick – jeden Gang, jede Kurve, die gut verborgenen Strahlenquellen, die mehr als 50 Meter hohe Maschinenhalle, die die Drohnen erkunden sollen, und die beiden schweren Stahltüren, hinter denen die Dummy-Puppen für die Kategorie »Search & Rescue« abgelegt sind.
Jurorenteam besteht aus renommierten Strahlen- und Robotikexperten
EnRicH-Organisator Dr. Frank E. Schneider, stellvertretender Leiter der FKIE-Abteilung »Kognitive Mobile Systeme« (CMS), und sein Orga-Team beobachten über diese Kameras jeden Lauf aufmerksam. »Die Forderung nach Kooperation von fliegenden und fahrenden Systemen und ein unbekanntes, dabei sehr großes und über zwei Ebenen verteiltes Einsatzszenario sind eine höchst anspruchsvolle Aufgabenstellung«, gesteht Schneider zu. »Über die Kooperation von UAV und UGV wird viel gesprochen, allerdings sehen wir, dass es hier noch erheblichen Verbesserungsbedarf gibt.«
Mit Dr. Michael Gustmann vom Kerntechnischen Hilfsdienst, Jan-Peter Paulick, Technischer Regierungsdirektor bei der Wehrtechnische Dienststelle für landgebundene Fahrzeugsysteme, Pionier- und Truppentechnik (WTD 41) der Bundeswehr, den beiden Robotikern Professor Daniel Watzenig und Kenneth Pink sowie Thilo Behrendt, Forschungsreferent Schlüsseltechnologien bei der Agentur für Innovation in der Cybersicherheit (Cyberagentur), besteht das EnRicH-Jurorenteam aus renommierten Strahlen- und Robotikexperten. Bei jedem Lauf schauen sie den Teilnehmern über die Schultern und protokollieren deren Ergebnisse. »Der Wert solcher Hackathons liegt auch darin, dass sich über die Veranstaltung eine Lernkurve bei den Teams ergibt«, erklärt Behrendt. »Ein Vorgehen, das im heimischen Umfeld gut funktioniert, muss es auf unbekanntem, schwierigem Terrain wie hier nicht auch tun.« Dann brauche es einen Plan B, den die Teams direkt vor Ort entwickelten.
Programmieren bis tief in die Nacht
Und zwar auch schon einmal bis tief in die Nacht. »Freizeit und Feierabend gibt es bei einer solchen Veranstaltung nicht«, sagt Noah Heckel. Mit seinen beiden Teamkollegen von CJT-Robotics hat der 17-jährige Oberstufenschüler aus der Nähe von Nürnberg bereits erfolgreich an mehreren RoboCups teilgenommen, bei der EnRicH hingegen will es mit ihrem »Error 404« zunächst nicht richtig funktionieren. »Eine stabile Verbindung zum Netzwerk herzustellen war deutlich schwieriger als gedacht«, erzählt er. Doch in mehreren Nachtsitzungen hätten sie das Problem schließlich gelöst – und überzeugten die Juroren am Ende mit einem beeindruckenden Durchgang. »Das Team hat sehr einfallsreich, kreativ und lösungsorientiert gearbeitet«, lobt Behrendt entsprechend. »Das war eine klasse Leistung.« Die im Übrigen mit dem »Young Scientist Award« der EnRicH ausgezeichnet wurde.
Viele spannende Lösungen hätten sie bei den Teilnehmern gesehen, einige nahe an dem, was derzeit eingesetzt werde, so Behrendt. Etwa bei dem polnischen Team Husarion, das als einziges auf Glasfaserkabel als Kommunikationslösung setzte und so den Datenfluss zu ihrem Roboter »Lynx« auch im hintersten Winkel des AKW aufrechterhalten konnte.
Fortsetzung bei der EnRicH 2027
»Ein sehr cleverer Ansatz«, lobt gleichfalls EnRicH-Organisator Schneider, der beispielsweise auch die Leistungen bei der Erstellung von 3D-Umgebungsmodellen über mehrere Etagen hinweg positiv bewertet. »Wir konnten viele interessante Innovationen beobachten, obwohl alle Teams durch die notwendige Umstellung des Robot Operating Systems von ROS 1 auf ROS 2 in ihrer Entwicklung beeinträchtigt waren«, so sein Fazit. Die ersten Ideen für den European Robotics Hackathon 2027 hat Schneider bereits im Kopf: »Wir werden bewährte Bestandteile aus diesem Jahr weiterentwickeln und darauf aufbauen«, verspricht er.
Weitere Informationen & Bilder:
https://enrich.european-robotics.eu
Ansprechpartner:
Dr. Frank E. Schneider, Abteilung »Kognitive Mobile Systeme«
Fraunhofer-Institut für Kommunikation, Informationsverarbeitung und Ergonomie FKIE
frank.schneider@fkie.fraunhofer.de I Telefon: +49 228 9435481










































































































































































