 Fraunhofer Institute for Communication, Information Processing and Ergonomics FKIE
Fraunhofer Institute for Communication, Information Processing and Ergonomics FKIE
Buoys overcome the boundary between the underwater and surface worlds
Data Transmission and Communication Beneath the Water's Surface
Around 70 percent of the earth's surface is covered by water. However, very little is known about what lies below sea level. Underwater sensors, gliders and autonomous submersible vehicles can help us to learn more about the oceans by recording environmental data such as salinity, currents and temperature, or by mapping the seabed. The potential areas of applications are vast. But how does the data make its way to the surface of the water? Fraunhofer FKIE has been working to answer this question for over ten years.
Tabbed contents
Task

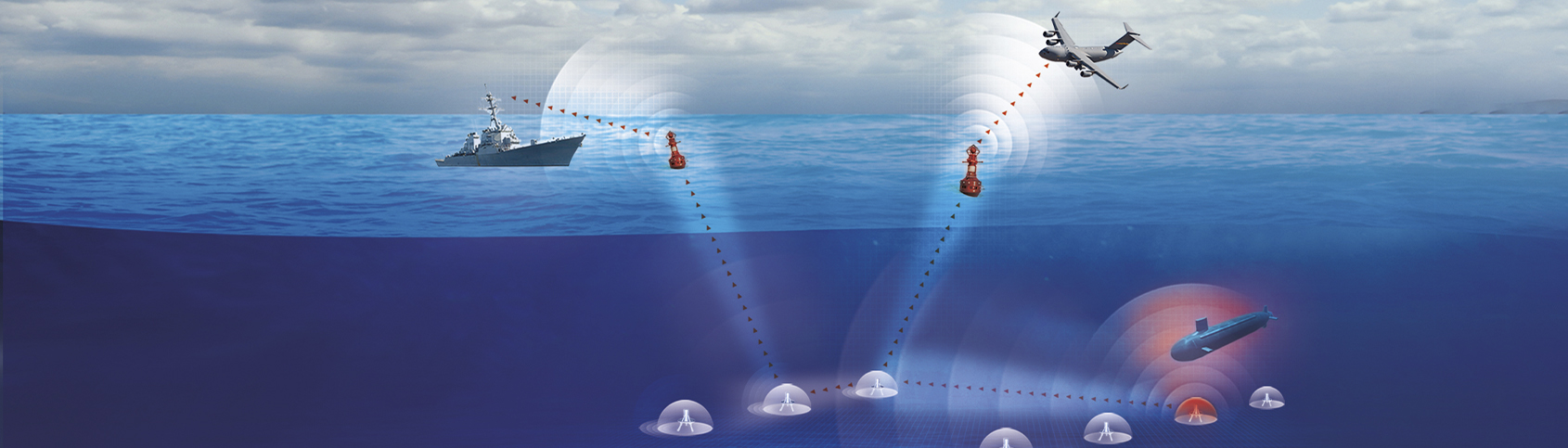
When lowered into the water, the gateway buoy serves as an intersection between the surface and underwater worlds.
The challenge of underwater communication is the water itself. Radio and light waves are heavily absorbed by the water. They disappear at a maximum depth of 60 metres. So how can data still be transmitted in the dark depths of the ocean? Nature itself provides the answer: Whales and other marine mammals communicate via sound. The deeper the sound, the farther it travels, meaning that it can be heard hundreds of kilometres away. Not only does sound achieve greater ranges underwater, it also travels around five times faster than in the air.
Low data rates
Nevertheless, there are some disadvantages. Noises such as passing ships, rain and waves on the water's surface can disrupt communication. The greatest challenge, however, lies in the low data rates that can be achieved with waterborne sound. While it is now possible to transmit several gigabits per second in the radio range, only a few kilobits per second can be transmitted underwater. The greater the desired range, the lower the selected frequency and the associated bandwidth must be. A frequency band of four to eight kilohertz with a net data rate of less than 1,000 bits per second is suitable for a range of ten kilometres.
However, the aim, is not only to connect individual devices. The goal is to create an entire network comparable to the internet. To achieve this, Fraunhofer FKIE is collaborating with partners to develop entirely new concepts, since standard IP networks are not suited to narrow-band channels. This raises questions such as: What information is absolutely essential? And how can data be pre-processed and optimally compressed?
Tests during practical sea trials
These questions should be considered not only from a theoretical standpoint. Fraunhofer FKIE also implements the solutions on real hardware and tests them out during practical sea trials. Only then can the concepts be proven to work in practice. The goal is to develop a fully functional prototype that has been evaluated under real operating conditions.
Methodology / Approach
First of all, the researchers examined which existing technologies were suited to the underwater communication environment. These are usually adapted to the specific requirements. However, it soon became apparent that, in the case of extremely low data rates and high latencies, researchers would need to take completely new approaches.
Part of a European consortium
To this end, they carried out a requirements analysis. Who wants to communicate what, when and to whom? As part of a European consortium of navies, industry and research institutes, Fraunhofer FKIE investigated this question and, together with WTD 71, specified an application language called “Generic Underwater Application Language” (GUWAL). GUWAL thus forms the basis of a common standard that devices can use to exchange data underwater. It defines the protocol for requesting and transmitting sensor data as well as exchanging commands with autonomous diving robots. Efficient data compression plays a key role here in order to meet the requirements of the narrow-band underwater channel. Consequently, GUWAL only requires a packet length of 128 bits.
Network protocol based on GUWAL
The researchers have also developed a network protocol based on GUWAL. This protocol transmits the short message packets between the participants while they are underwater. As the range is linked to the data rate, not all network participants can exchange data directly with each other. In large networks extending over a hundred kilometres or more, the data must be forwarded from participant to participant in the direction of the destination. This process is known as “multi-hopping” and is a key technology used in the underwater environment. However, this also requires that routes to the destination be found automatically and adapted to the constantly changing conditions. Fraunhofer FKIE has specifically adapted the GUWMANET network protocol to meet these requirements.
Before processes can be tested in real conditions during sea trials using complex, and costly methods, they must first be simulated and emulated in the laboratory. Fraunhofer FKIE has collaborated with research institutes and universities to develop a simulation environment. In this environment, GUWMANET was tested in a large number of simulations in this environment before being trialled at sea.
Results / Outlook

When lowered into the water, the gateway buoy forms the interface between the surface and underwater worlds.
Between 2010 and 2014, as part of the 'Robust Acoustic Communications in Underwater Networks' (RACUN) project conducted by the European Defence Agency (EDA), the five participating nations — Germany, the Netherlands, Italy, Norway and Sweden — developed and tested various underwater protocols against each other. Submersible vehicles from ATLAS Elektronik and modems from Hamburg-based company Develogic were also deployed.
The GUWMANET network protocol, developed by Fraunhofer FKIE and WTD 71, was used as a point of reference for evaluating the other processes. GUWMANET delivered the best results by far in both the simulations and the final sea trial, achieving packet transmission rates of around 90 per cent. Consequently, it was selected as the standard for the subsequent project, 'Smart Adaptive Long- and Short-range Acoustic Network' (SALSA), and is currently undergoing further development with the European partners.
Final trial took place in the Oslofjord, Norway
The SALSA project has developed new strategies to enable the network protocol to automatically switch between different profiles. Some profiles are highly robust and suited to challenging conditions with high noise levels, while others are less robust but deliver higher data rates. These processes were trialled during port tests in Kiel (Germany) in 2020 and Lake Vättern (Sweden) in 2021, as well as in NATO exercises REP(MUS) 21, 22, 23 and 24. The final trial took place in the Oslofjord, Norway, in April 2022. GUWMANET was operated for the first time on the UT3000 underwater telephone from ELAC Sonar, which is used for submarine communication, among other things.
This enabled communication with the autonomous submersible vehicles and the sensor nodes on the seabed. The network provided regular position and status updates, enabling the operator to intervene if necessary. As part of the current EDF project, 'SWArm and Teaming Operation of Manned & Unmanned Underwater Vehicle SHOAL' (SWAT-SHOAL), this technology is being developed further to enable the command of entire swarms of unmanned underwater drones. The implementation of common standards such as GUWMANET and GUWAL has enabled the establishment of an international underwater network involving project partners from the Netherlands, Finland, Norway, Sweden, Germany, Spain, Portugal, Poland, Estonia, Italy, Belgium and Greece.
Intersection between the surface and underwater worlds
In addition to GUWAL and GUWMANET, Fraunhofer FKIE developed a prototype gateway buoy in collaboration with WTD 71. Serving as an intersection between the surface and underwater worlds, it enables underwater devices to be connected to existing terrestrial networks. Radio technologies used include 4G and 5G networks with a range of around ten kilometres, as well as HF radio with a range of over 65 kilometres.
The gateway buoy is also equipped with technology that enables transmission via the LoRa radio standard. The prototype was deployed in large-scale NATO exercises (REP(MUS)) near Lisbon, Portugal between 2021 and 2024. The buoy relayed underwater data packages from GUWAL to a maritime operations centre on land. Future projects of interest will include those in which the buoy can act as a 5G network amplifier or be integrated as an end device in 5G NTN (Non-Terrestrial Networks) infrastructure.
Project partners
- Bundeswehr Technical Center for Ships and Naval Weapons, Maritime Technology and Research (WTD 71)
- ATLAS ELEKTRONIK GmbH
- develogic GmbH
- ELAC SONAR GmbH
International partners in the SALSA project