Fraunhofer Institute for Communication, Information Processing and Ergonomics FKIE
Fraunhofer Institute for Communication, Information Processing and Ergonomics FKIE

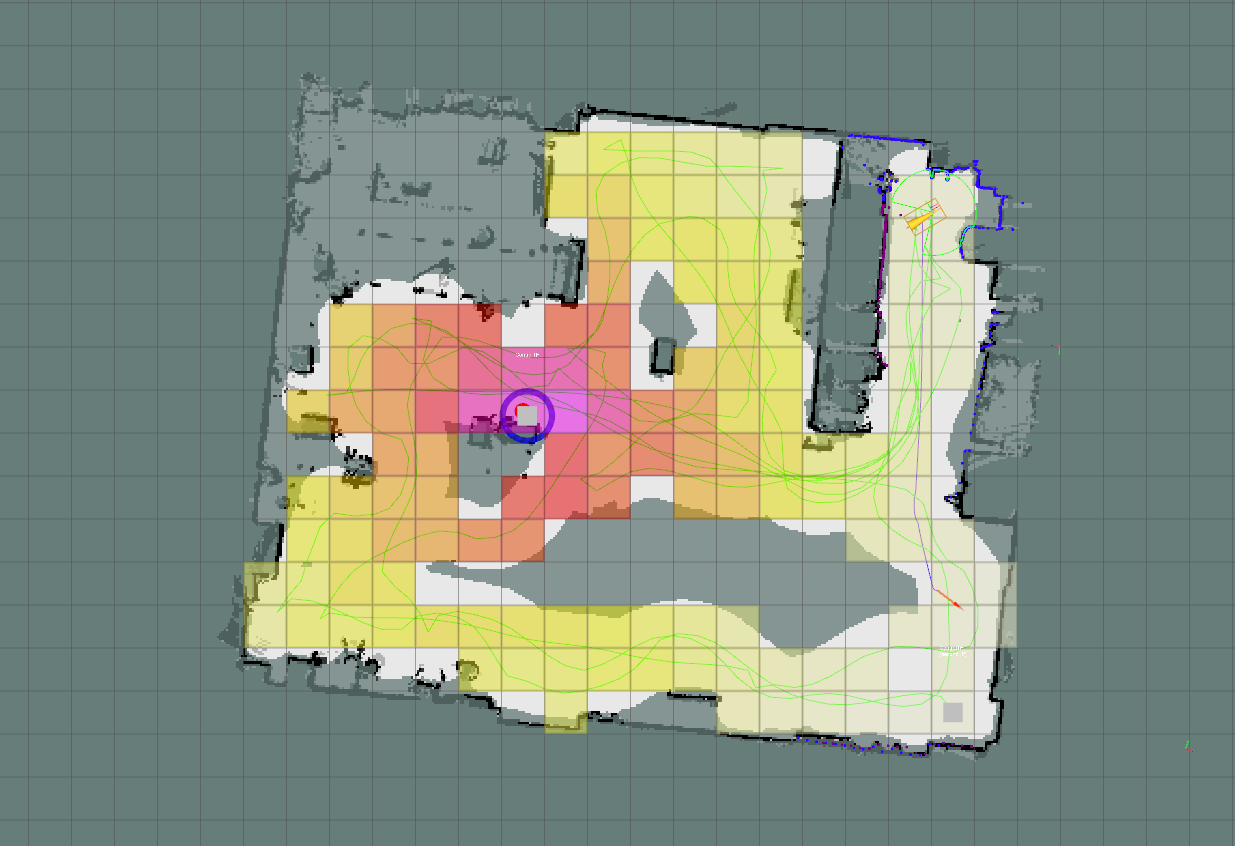
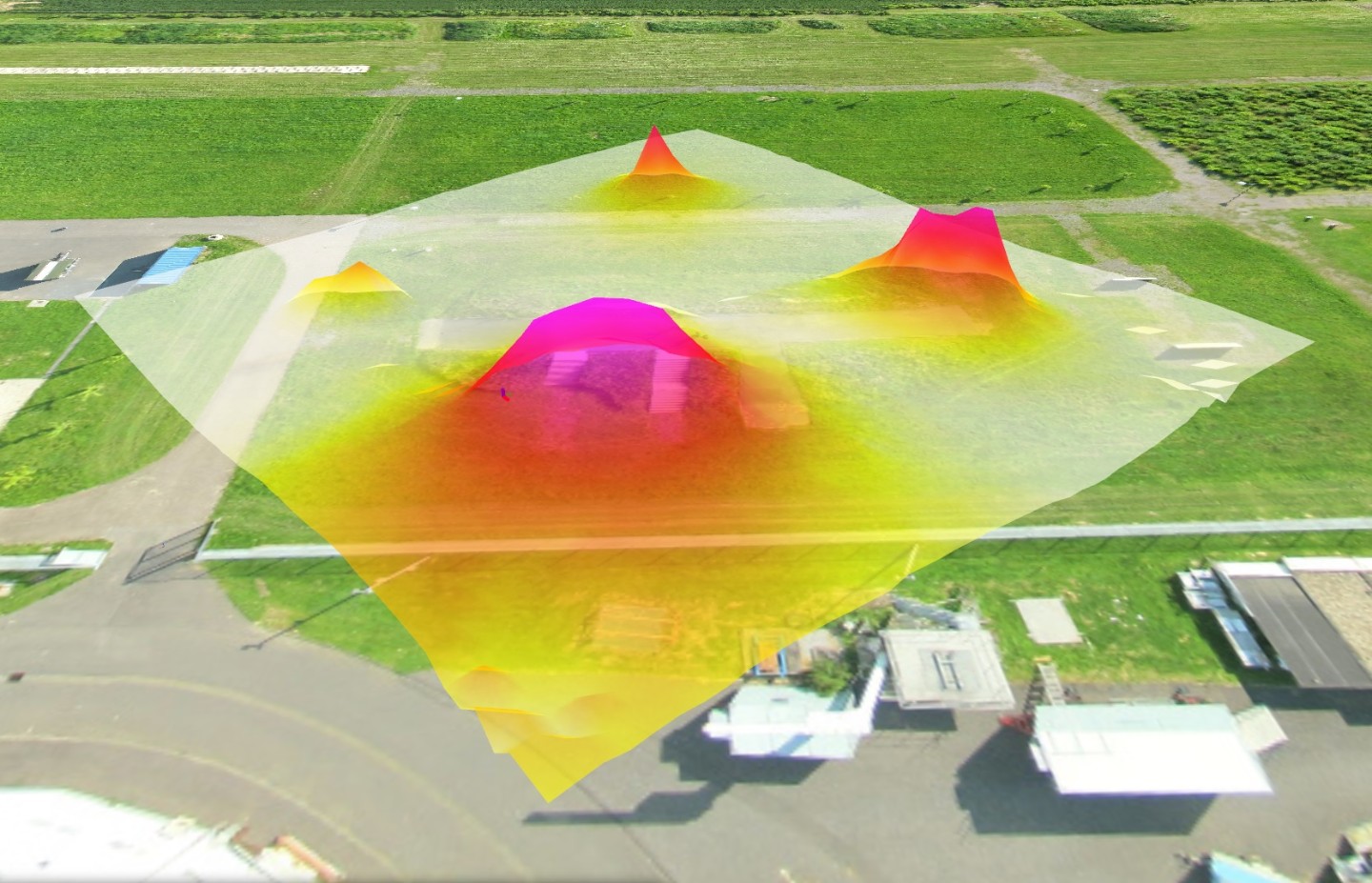
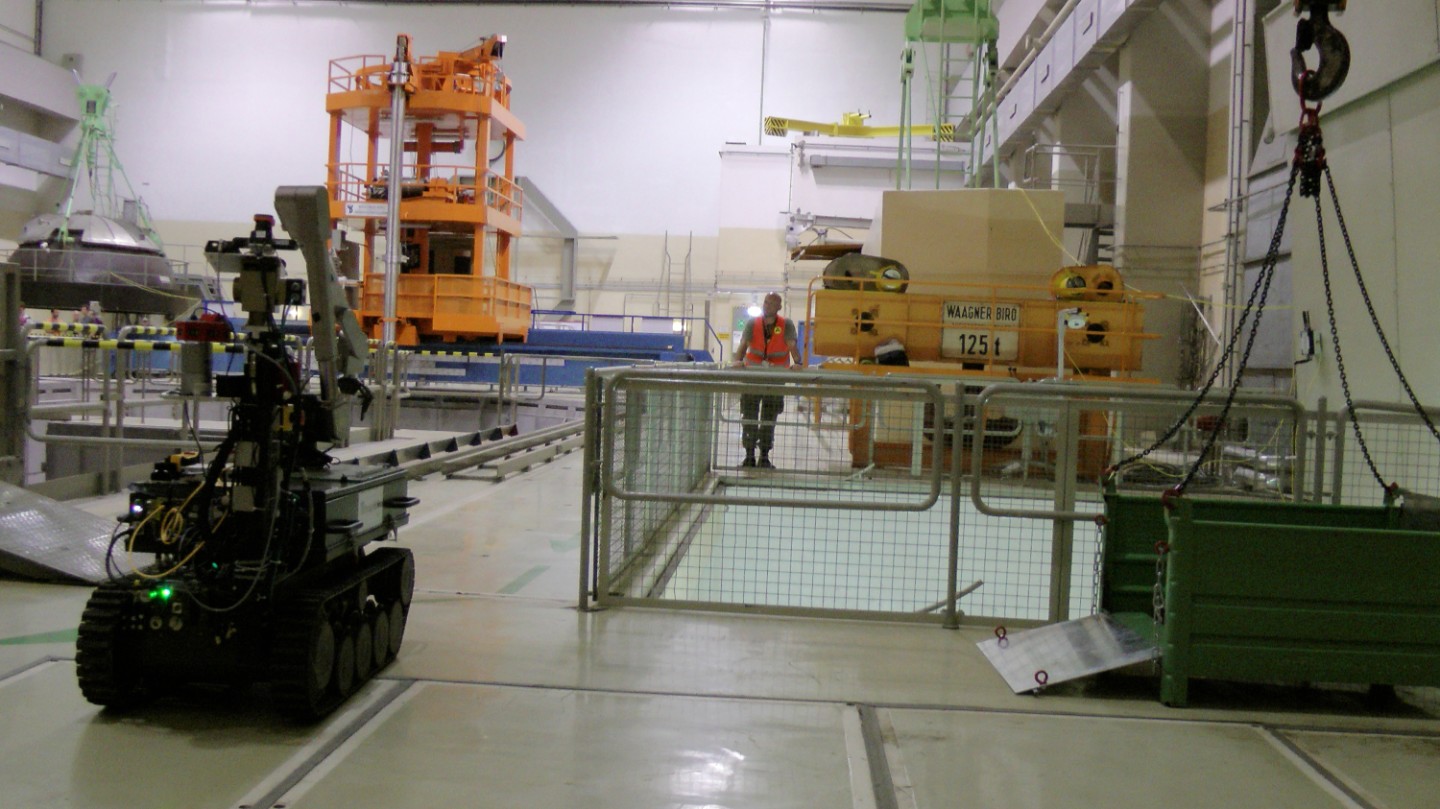
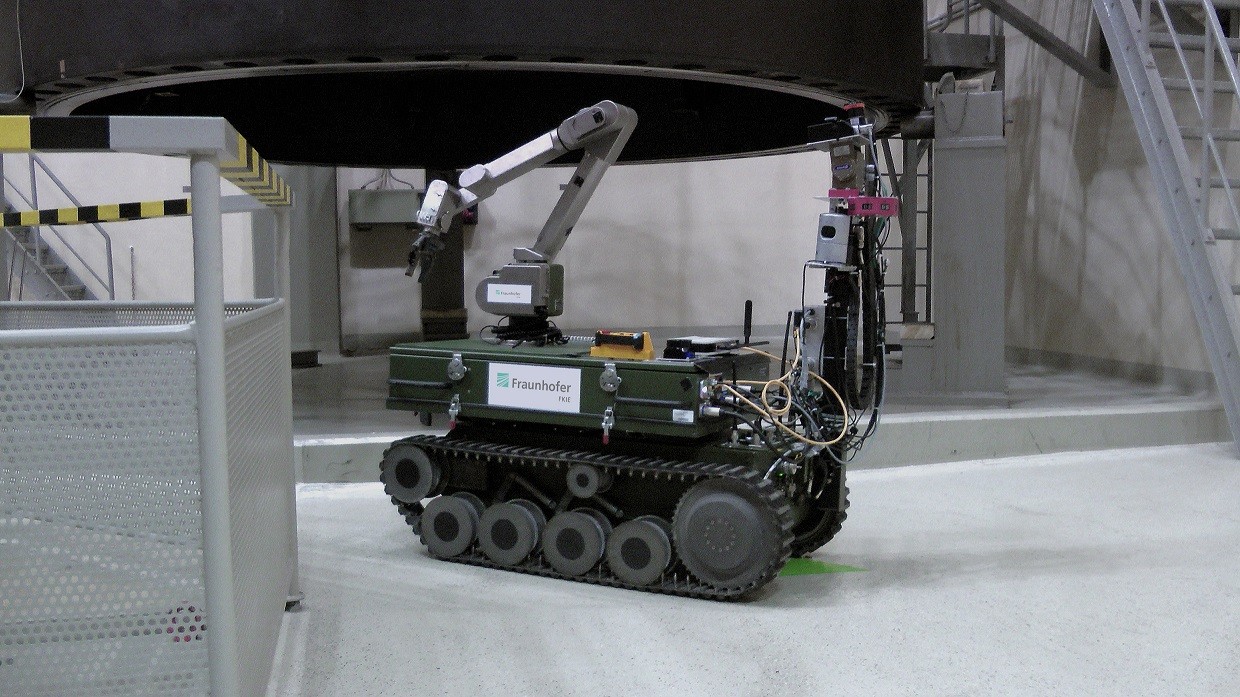
When tasks are too dangerous for humans, robots provide support. CBRNE reconnaissance is a prime example of such a task. CBRNE stands for »Chemical, Biological, Radiological, Nuclear and Explosive«. Examples of such materials are aggressive hazardous materials and radioactive contamination, which pose extreme challenges for the armed forces and police security forces in an emergency. A danger to life and limb can never be completely ruled out, even with the right equipment and extensive training. Robots equipped with CBRNE sensor technology and autonomous assistance functions take over in such cases.
Supported by the German Federal Armed Forces, the »Cognitive Mobile Systems« department is researching the innovative combination of CBRNE reconnaissance sensor technology, navigation strategies and geodata processing. It is also focusing on development of intelligent assistance functions that greatly simplify the remote control of robots by making it more intuitive and easier to use, or even by performing fully automated subtasks.