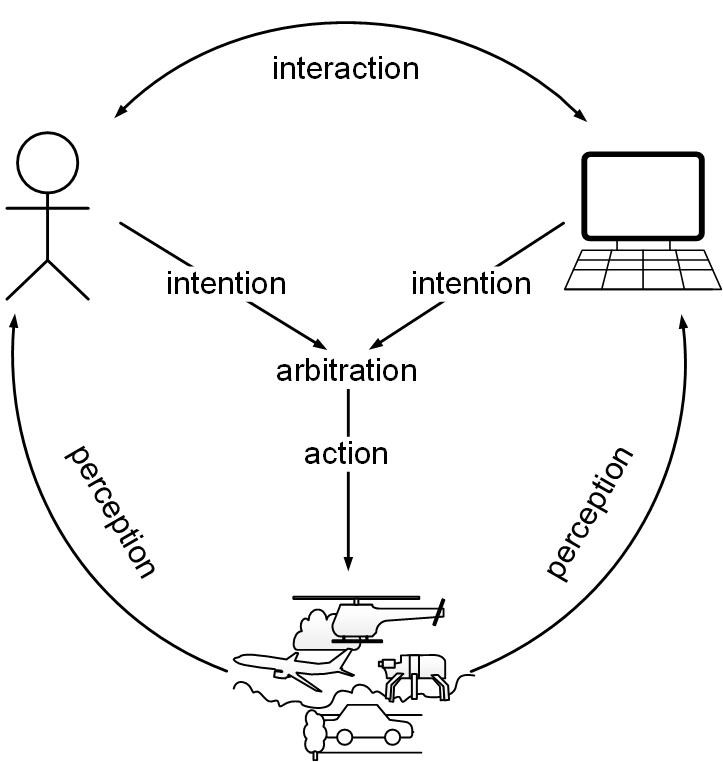
The concept of cooperative vehicle guidance is based on a generic approach to describe the degrees of freedom of interaction between humans and automation. Two existing implementations of cooperative vehicle guidance are conduct-by-wire (CbW), which operates by discretely assigning maneuvers, and the H-mode. The latter enables a continuous and direct interaction via the traditional control elements such as the steering wheel and gas pedal or via alternative control elements such as active sidesticks and contains discrete components on the maneuver and control level. Numerous complex technical functions are integrated in such a way that they can be provided to humans as a coherent, intuitively operated co-system for partially- and highly automated vehicle guidance.
The basis of this system is a four-level assistance and automation scale:
AAM1 (»driver only« to »assisted«)
The vehicle is controlled largely independently by the driver. However, the automation system gives suggestions for action, for example in the form of haptic signals via the control unit.
AAM2 (»assisted«)
Active assumption of the longitudinal guidance by the Adaptive Cruise Control (ACC) controlled by the automation system and passive assistance that informs the driver.
AAM3 (»partially automated« to »highly automated«)
The operator can trigger situation-dependent driving maneuvers with haptic gestures on the control unit. These maneuvers are carried out independently by the automation system and can be felt, modified, changed and aborted by the operator at any time. The driver thus not only retains control, but also remains actively in the loop.
AAM4 (»highly automated« to »fully automated«)
Under appropriate circumstances, highly automated driving is implemented, where the driver can also leave the vehicle's control circuit for a limited time.
The »StrAsRob« project transferred the fundamental ideas of cooperative vehicle guidance and the H-mode to the interaction with highly automated trucks. The project kicked off with a number of workshops with various stakeholder groups (drivers, vehicle registration office, designers and developers) to define potential use cases. Typical examples of those are setting up the vehicle, assembling the platoon, highly automated or assisted following of the leader vehicle or temporary disbanding of the platoon. The four modes of the assistance and automation scale were applied to these tasks, and an interaction concept was developed. To test usability, three pre-set sequences were designed and evaluated in the simulator.
 Fraunhofer Institute for Communication, Information Processing and Ergonomics FKIE
Fraunhofer Institute for Communication, Information Processing and Ergonomics FKIE