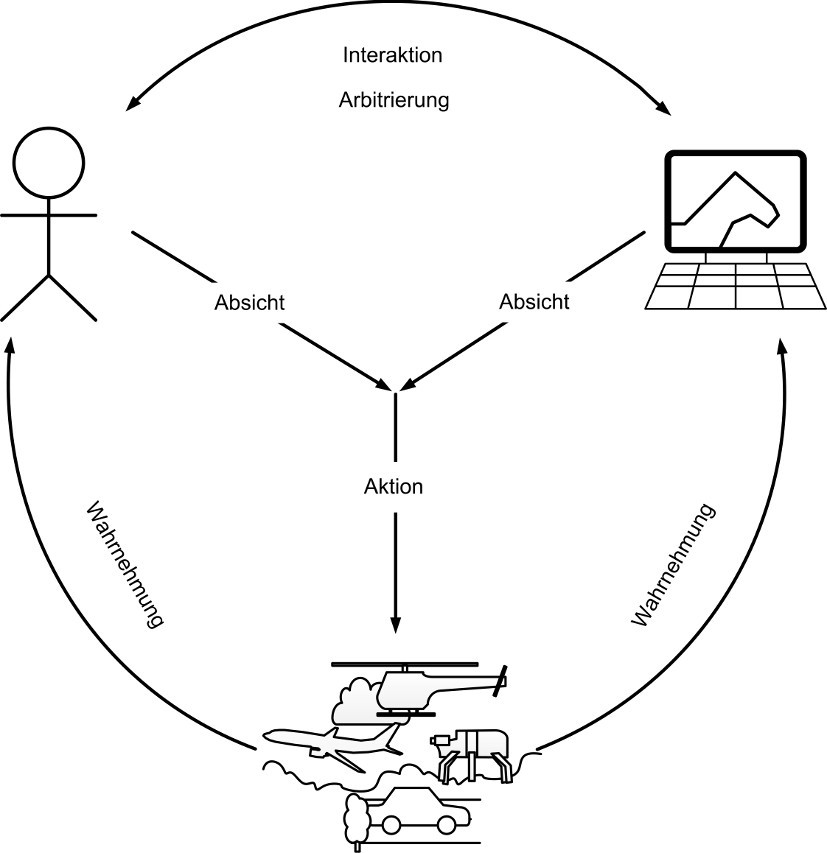
Das Konzept der kooperativen Fahrzeugführung basiert auf einem generischen Ansatz zur Beschreibung der Freiheitsgrade des Zusammenwirkens von Mensch und Automation. Zwei bereits existierende Implementierungen von kooperativer Fahrzeugführung sind Conduct-by-Wire, das durch diskrete Beauftragung von Manövern operiert, und H-Mode. Letzterer ermöglicht eine kontinuierliche Interaktion direkt über die üblichen Stellteile wie Lenkrad und Gaspedal oder auch über alternative Stellteile wie aktive Sidesticks und beinhaltet diskrete Anteile auf der Manöver- und Kontrollebene. Zahlreiche komplexe technische Funktionen werden so integriert, dass sie dem Menschen als zusammenhängendes, intuitiv bedienbares Co-System für eine teil- und hochautomatisierte Fahrzeugführung angeboten werden können.
Grundlage ist eine vierstufige Assistenz- und Automationsskala:
AAM1 (»Driver only« bis »Assistiert«)
Das Fahrzeug wird vom Fahrer überwiegend selbstständig geführt. Die Automation gibt jedoch Handlungshinweise, z.B. in Form haptischer Signale über das Stellteil.
AAM2 (»Assistiert«)
Aktive Übernahme der Längsführung durch das von der Automation gesteuerte Adaptive Cruise Control (ACC) sowie eine passive, den Fahrer informierende Assistenz.
AAM3 (»Teilautomatisiert« bis »Hochautomatisiert«)
Situationsabhängig angebotene Fahrmanöver können durch haptische Gesten am Stellteil ausgelöst werden. Diese Manöver werden von der Automation selbstständig durchgeführt und können jederzeit vom Menschen mitgefühlt, modifiziert, geändert und abgebrochen werden. Der Fahrer behält dadurch nicht nur die Kontrolle, sondern bleibt auch aktiv »im Loop« eingebunden.
AAM4 (»Hochautomatisiert« bis »Vollautomatisiert«)
Unter geeigneten Bedingungen wird ein hochautomatisiertes Fahren umgesetzt, bei dem der Fahrer auch für eine begrenzte Zeit aus dem Fahrzeugführungskreis gehen kann.
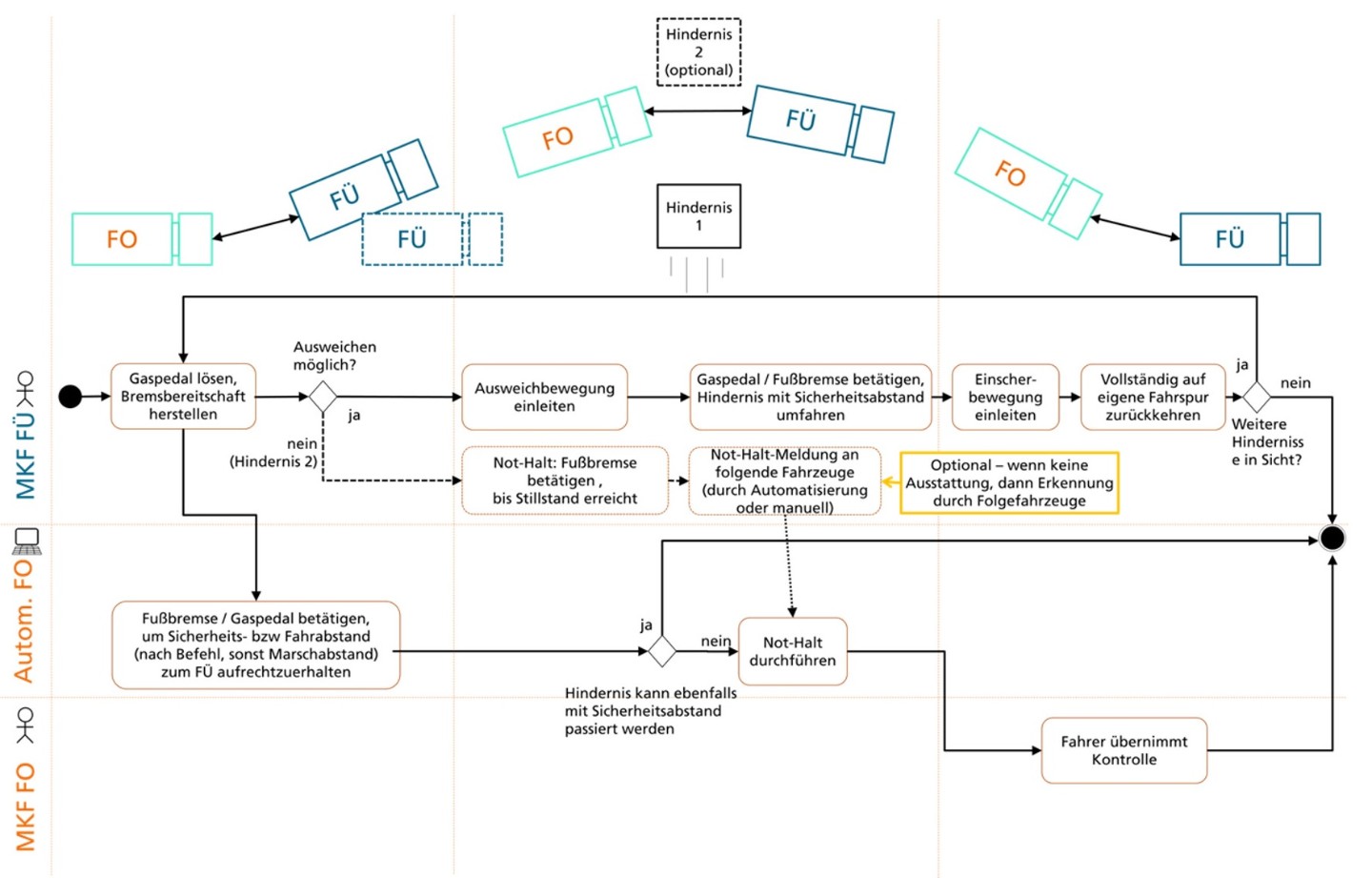
Im Rahmen des Projekts »StrAsRob« wurden die Grundgedanken der kooperativen Fahrzeugführung und des H-Mode ansatzweise auf die Interaktion mit hochautomatisierten LKWs übertragen. Dazu wurden zunächst Workshops mit verschiedenen Stakeholder-Gruppen (Kraftfahrer, Zulassungsstelle, Gestalter und Entwickler) durchgeführt, um Anwendungsfälle zu definieren. Typische Beispiele dafür sind das Anlernen der Fahrzeuge, das Zusammenstellen des Konvois, das hochautomatisierte oder assistierte Folgefahren oder das temporäre Auflösen des Konvois. Auf sie wurden die vier Modi der Assistenz- und Automationsskala angewendet und ein Interaktionskonzept erstellt. Zur Überprüfung der Gebrauchstauglichkeit wurden jeweils drei feste Abfolgen konzipiert und im Simulator durchfahren.
 Fraunhofer-Institut für Kommunikation, Informationsverarbeitung und Ergonomie FKIE
Fraunhofer-Institut für Kommunikation, Informationsverarbeitung und Ergonomie FKIE